연구
산학 연계 프로그램

Field 수요 지향적 산학협력 혁신 연구 추진 체계
- 산업 현장에서 요구되는 기술 수요를 바탕으로 참여기관이 실질적으로 필요로 하는 연구 주제를 선정하는 참여기업 수요 중심의 연구 프로젝트 수행
- 4대 융합보안 핵심기술과 매칭되는 참여기관과 각 분야의 최신/고도화된 연구력을 보유한 참여교수와 매칭을 통한 전분분야 집중적 연구 프로젝트 수행
- 참여기관-교수-지도학생 간 체계화된 소통 채널 및 연구프로젝트 간담회 등의 협력체계 기반의 체계화된 연구 프로젝트 수행을 통한 연구 프로젝트 수행의 수월성 확보
프로젝트
1. 드론 원격제어 프로토콜을 사용하는 융합체계 보안위협 연구
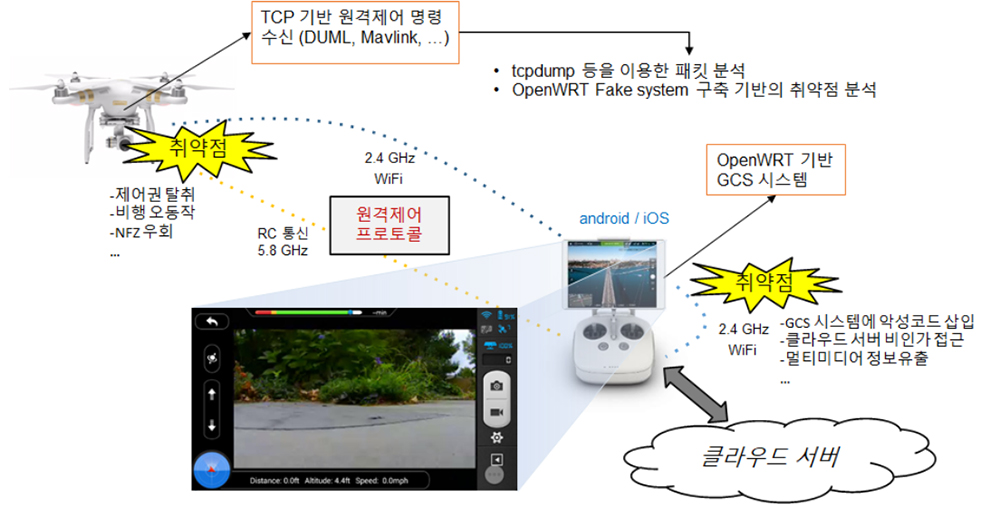
목표 : 차량/드론 기반의 소규모 무인이동체 시스템부터 광대역 전파통신, 위성 등 우주산업 관련 무인이동체 요소들까지 넓은 범위의 통신 및 프로토콜 상호작용에서 존재할 수 있는 보안 문제점을 융합적으로 분석하고 안정성을 확보
2. 무인이동체 펌웨어 대상 퍼징 기반 자동화 테스팅 연구
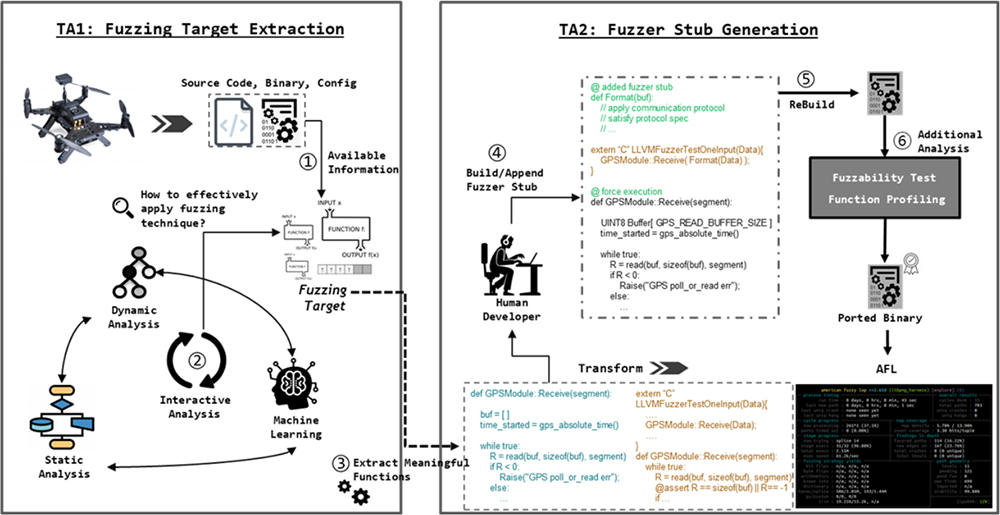
목표 : 소스코드가 공개되지 않음으로 인한 기존 퍼징기술 적용의 한계 및 임베디드 바이너리의 에뮬레이션 기반 퍼징의 비효율성을 해결하기 위한 무인이동체 펌웨어의 자동화 테스팅을 효율적으로 할 수 있는 퍼징 시스템 개발
3. PX4 Autopilot 오픈소스 SW의 취약점 분석 및 보안성 강화 연구
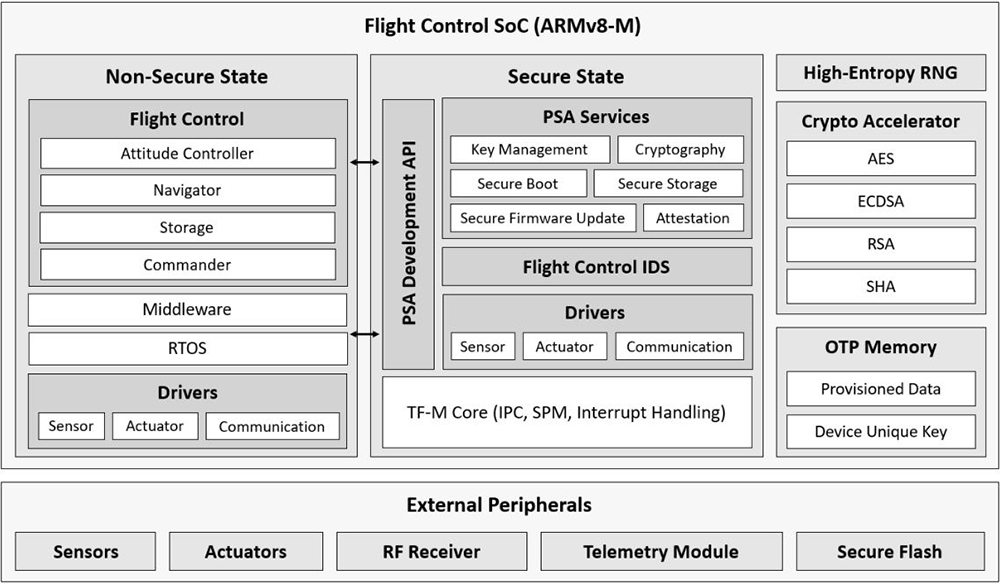
목표 : 기존 무인이동체를 대상으로 한 공격 형태 및 대응방안을 분석하며, 이를 기반으로 ARM PSA (Platform Security Architecture) 기반의 안전한 드론 설계 및 개발을 통해 PX4 Autopilot 오픈소스 SW에 기여
4. 에지 클라우드 보안시스템을 위한 로그 분석 프레임워크 연구
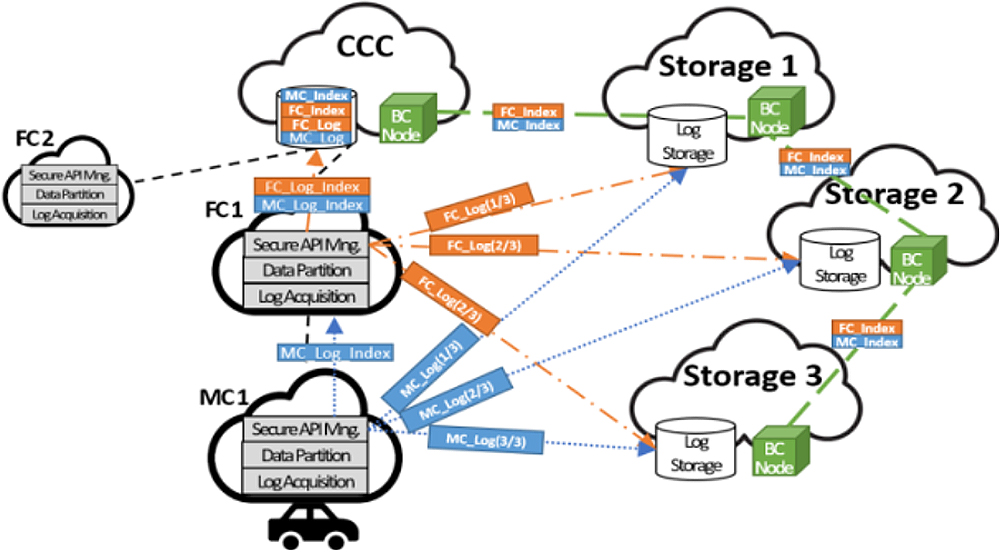
목표 : 에지 클라우드 환경에서 에지 보안 및 서비스 품질 관리 수행을 지원하는 로그 수집 및 분산 보관 방법 연구 수행으로, 에지 자원 분석 기반의 Autonomous Log Data Fragmentation 알고리즘 개발
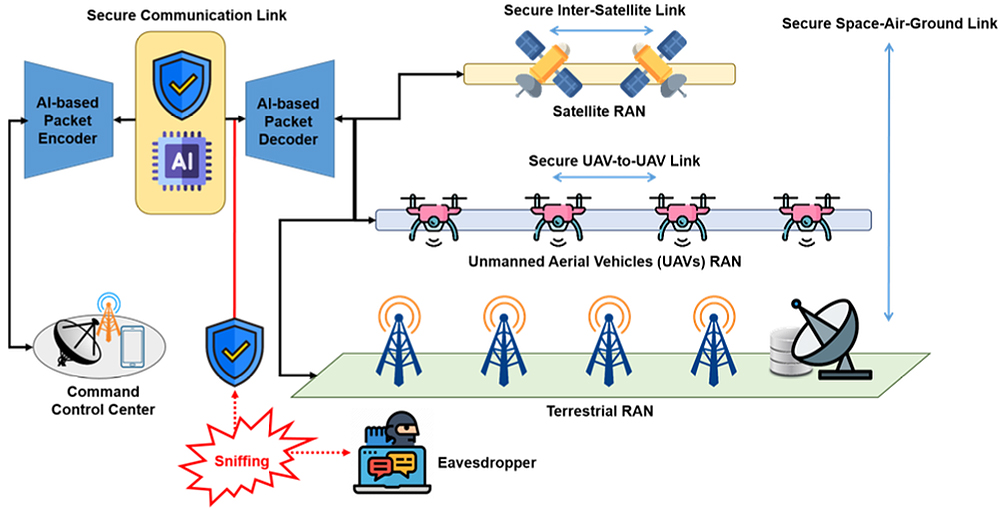
5. 드론 기반 3차원 네트워크 무선 통신 보안기술 연구
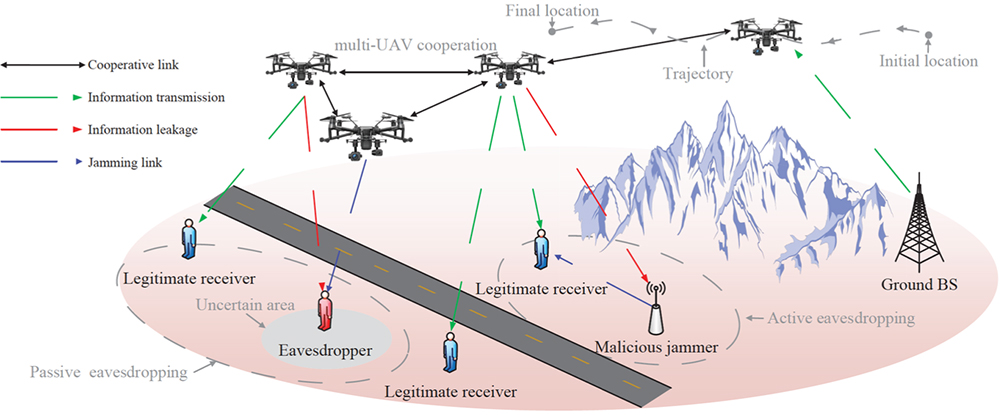
목표 : 무인이동체와 저궤도 위성으로 구성된 비지상 네트워크와 기존 지상 네트워크를 통합하여 커버리지를 확대하고, 통합 네트워크에서 발생할 수 있는 도청 및 능동 공격 시나리오에 대응할 수 있는 저복잡도 물리계층 보안기술 개발
6. 수직 이착륙/고속비행 무인이동체 다분야 통합 설계 연구
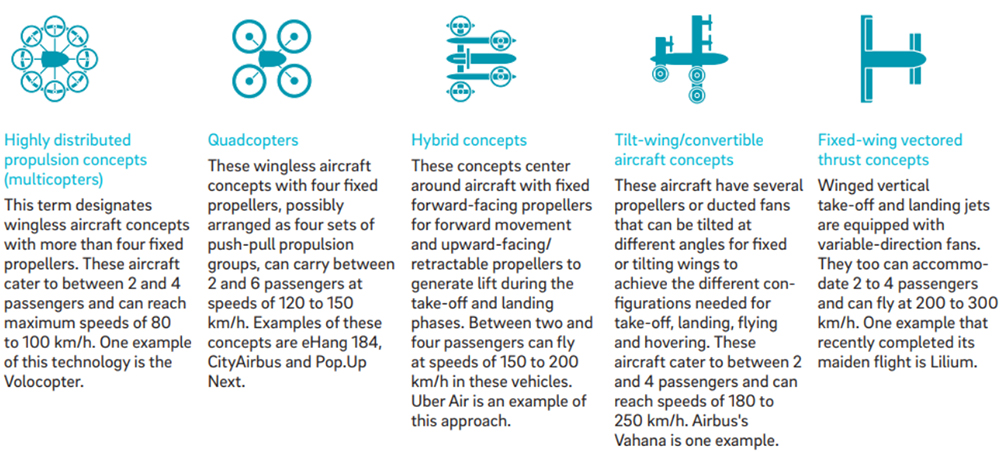
목표 : 장거리 운행이 가능한 효율적 무인이동체의 개념 설계에 필요한 공력, 구조, 추진, 제어 등 기술적 구성요소들의 영향에 대한 해석에 기반한 다분야 최적설계 (MDO: Multidisciplinary Design Optimization)를 통해 구현
7. 양자보안통신을 위한 양자 토모그래피 핵심기술 연구
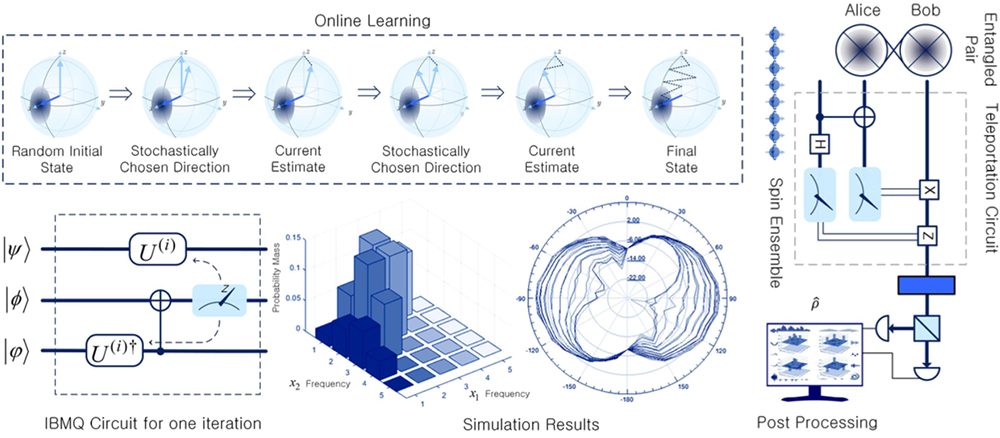
목표 : 양자키분배, 양자채널 추정 등 양자암호화를 위한 온라인 학습 (Online learning), 입자 필터링 (Particle filtering) 및 압축 센싱 (Compressed sensing) 양자 상태 토모그래피 연구를 통한 양자보안통신 구현에 요구되는 핵심기술 개발
8. 역강화학습과 순환신경망을 이용한 혼잡, 복잡 공간에서의 모바일 로봇 사회적 항법 연구
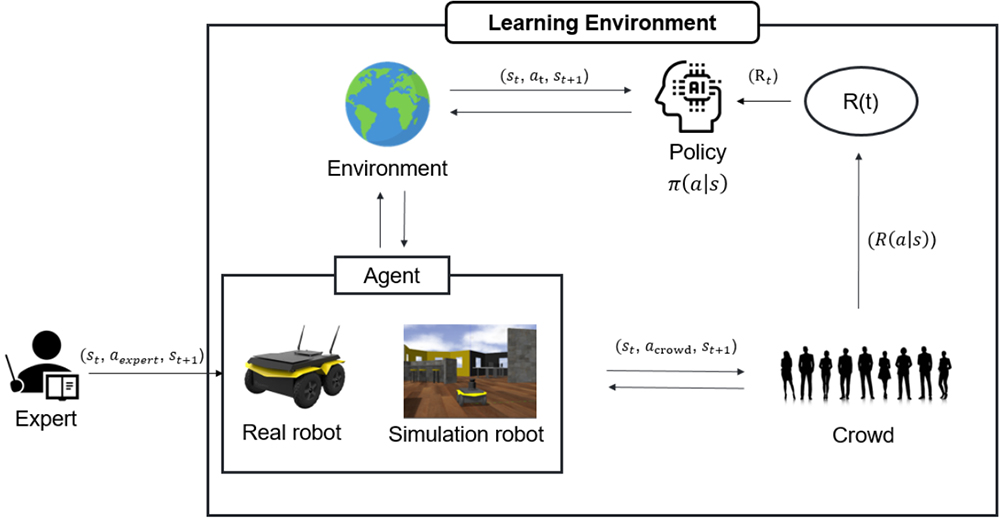
목표 : 사람들의 성별, 나이, 그룹에 따른 편안함을 고려한 로봇 항법 모델 개발 및 보상 모델 최적화를 통한 Socially-aware navigation 알고리즘 개발
9. 블랙박스 환경에서 적대적 공격을 위한 범용 적대 샘플 및 방어 방법 연구
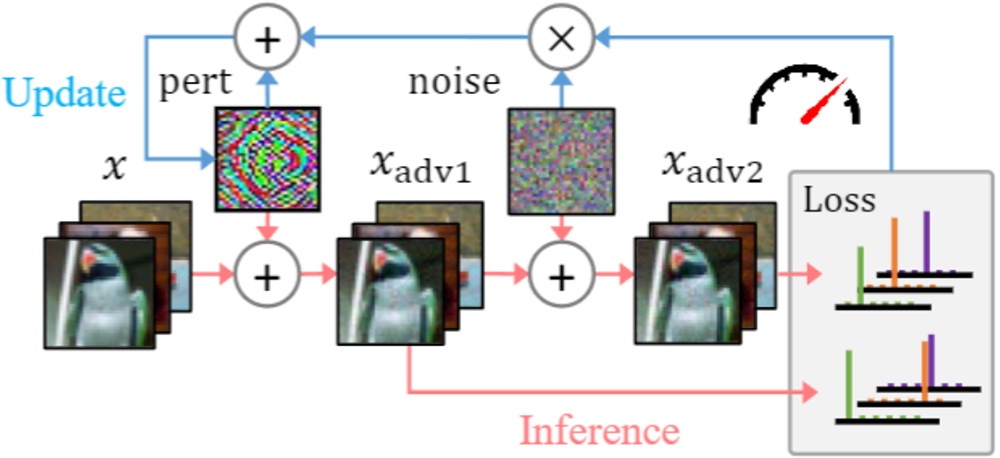
목표: 클라우드 기반의 서비스 뿐만 아니라 심층신경망을 이용하는 무인이동체 시스템에 대한 적대적 샘플을 소수의 쿼리와 피드백만으로 생성할 수 있는 방안 연구
10. 인공지능 기반의 무인이동체 융합보안 시스템 연구
목표 : 무인이동체의 특성을 고려한 인공지능 기반 무인이동체의 고수준 자동 보안 시스템 설계 및 개발
11. 임베디드 시스템을 위한 컴파일러 기반 자동 보안 코드 삽입
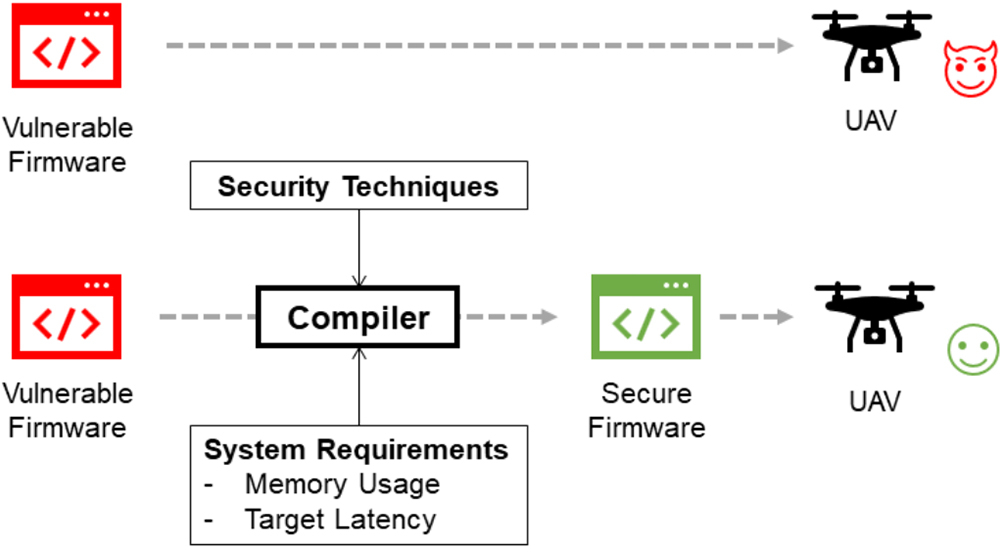
목표 : 무인이동체를 비롯한 임베디드 시스템에 탑재되는 펌웨어를 컴파일러를 통해 자동으로 분석하고 최적화하여 임베디드 시스템의 높은 보안성을 보장
12. 인공지능 기반의 인간중심의 강인한 객체 검출 네트워크에 대한 연구
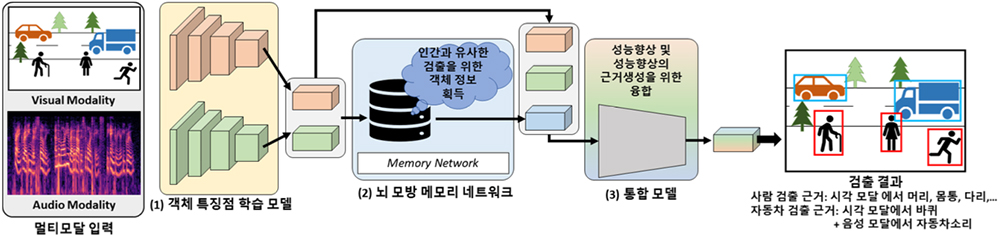
목표 : 무인이동체 환경에서 인간을 모방한 강인한 객체 검출 네트워크 개발